
Linear Robot

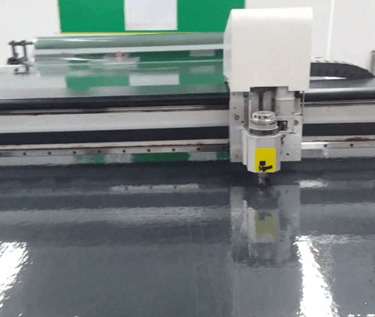
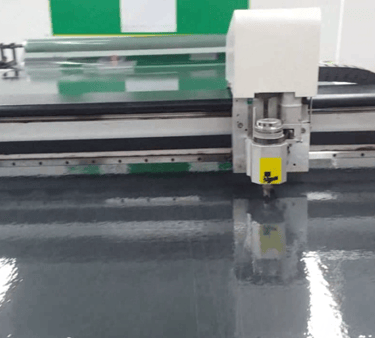
Linear Robot (also known as cartesian robot) is an industrial 3 degree of freedom robot whose three principal axes of control are linear and are at right angles to each other.
The three sliding joints correspond to moving the joints up-down, in-out, back-forth. Among other advantages, this mechanical arrangement simplifies and more economical compared to the Robot control arm solution. It has high reliability and precision when operating in three-dimensional space.
As a robot coordinate system, it is an effective for horizontal travel and for manipulating items in its workstation specifically on pick and place tasks. The end effector can also be designed to suit the customer requirements and various product types, dimensions and payloads. Applicable in sectors such as the Agricultural Sector or the Manufacturing Sector (F&B, Water Bottles, Wood factories etc), this system can be designed to perform highly repetitive tasks, reducing the required number of workers.
Why Choose Linear Robot?
Our Linear Robot was registered MySTI under The Ministry of Science, Technology, and Innovation (MOSTI)


MySTI Certified






Unique Selling Proposition
Modifiable
Designable according to demand
The Linear Robot can be designed to be compatible with the customer's production process, production speed, and site layout.
Scalable
The size of the system can be designed according to demand, from as small as a tabletop system, to a large system encompassing an entire factory floor.
Economical
The Linear Robot System is a more economical solution compared to the conventional Robot Arm solutions.
The Linear Robot can be designed with multiple modular end effectors, allowing the robot system with interchangeable functionalities.
Local Support Team
The Linear Robot is designed by our local team to solve problems faced by local companies. Any issues with the system will be solved by our local team, located within Malaysia.
Compatible with IR4.0 technologies
The Linear Robot System is compatible with various IR4.0 solutions, such such as Big Data, Artificial Intelligence, and Cyber Security solutions.
1
2
3
4
5
6
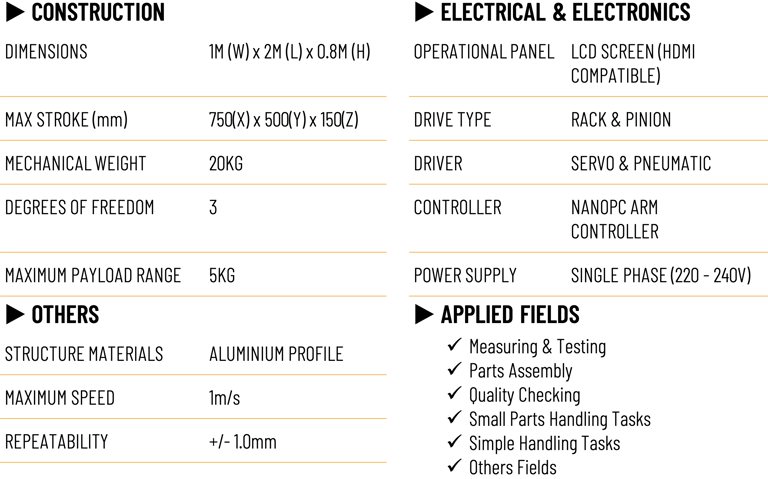
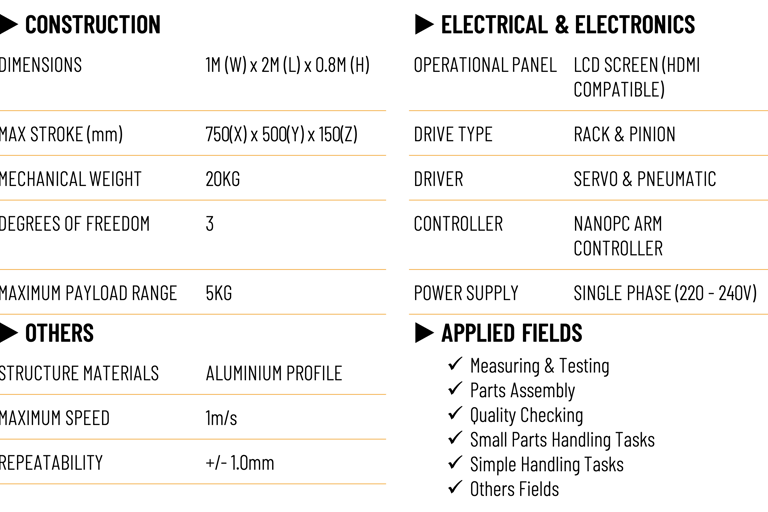
Technical Specifications
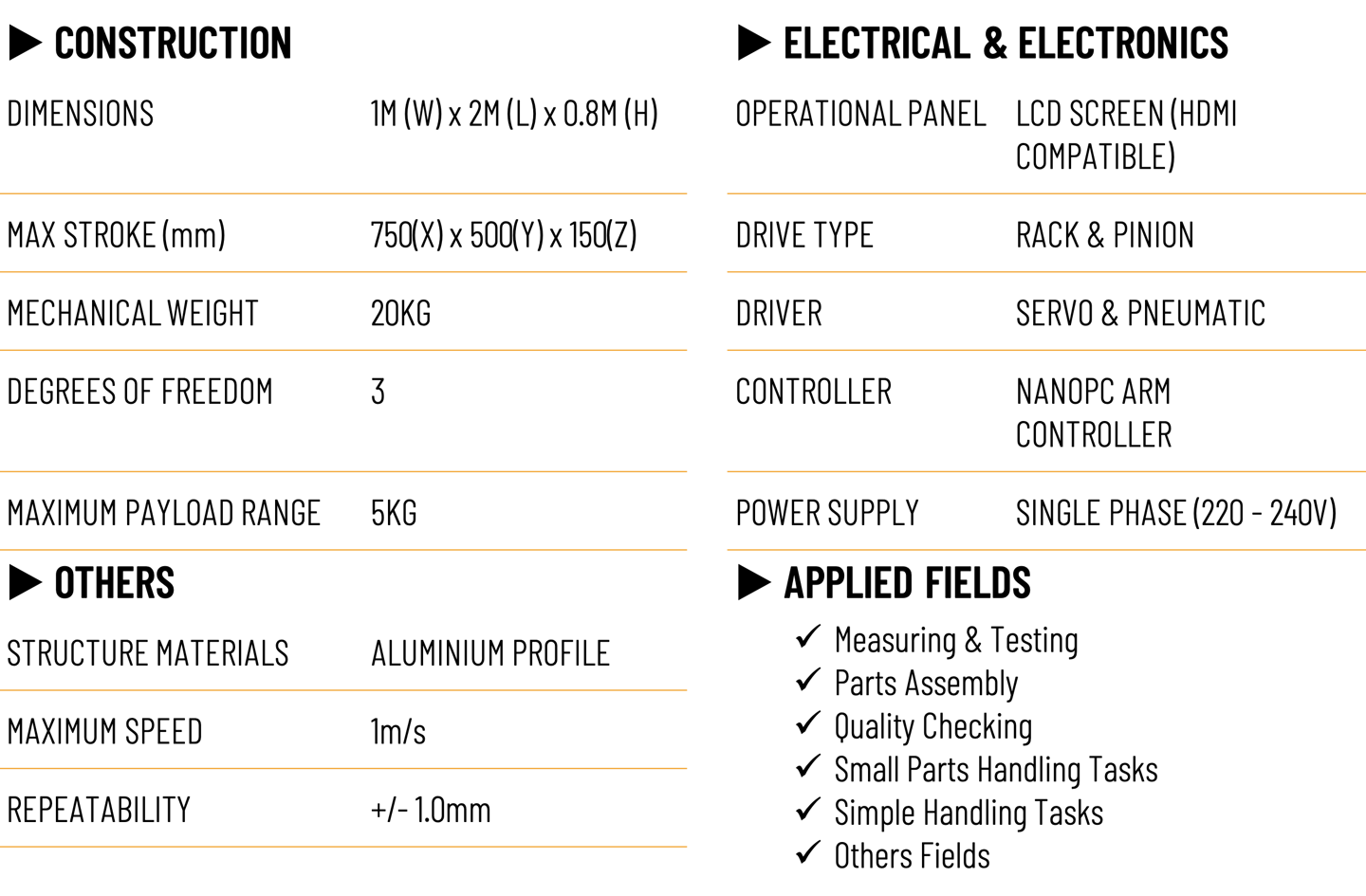
MODEL TLR005X
MODEL TLR050X
© 2026 T-Robot Sdn Bhd 202201017532 (1463229-A). All Rights Reserved.
Quick Links